22 Mar., 2017
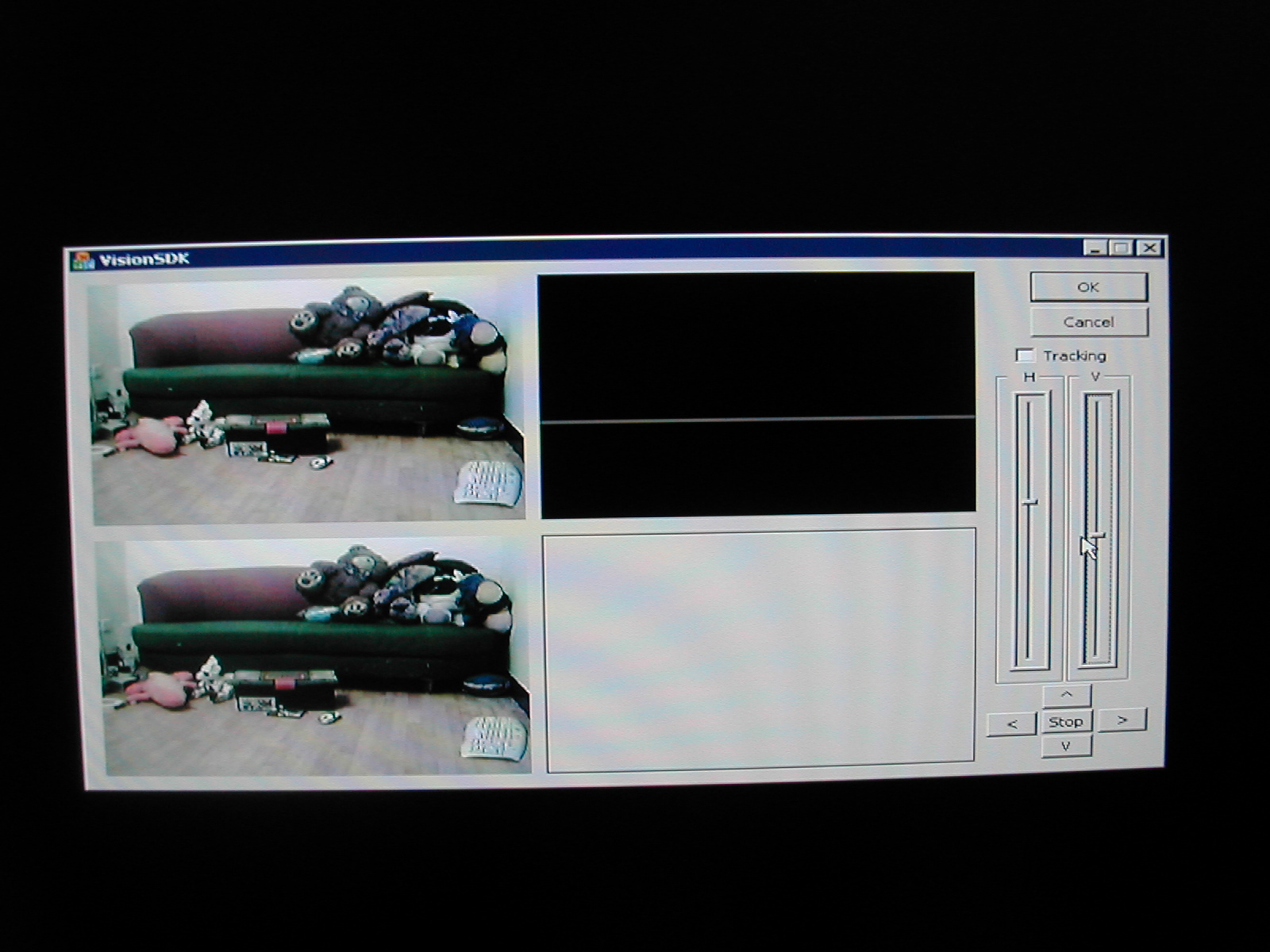
Stereo vision with facetracking, the program support: 21 Apr., 2016
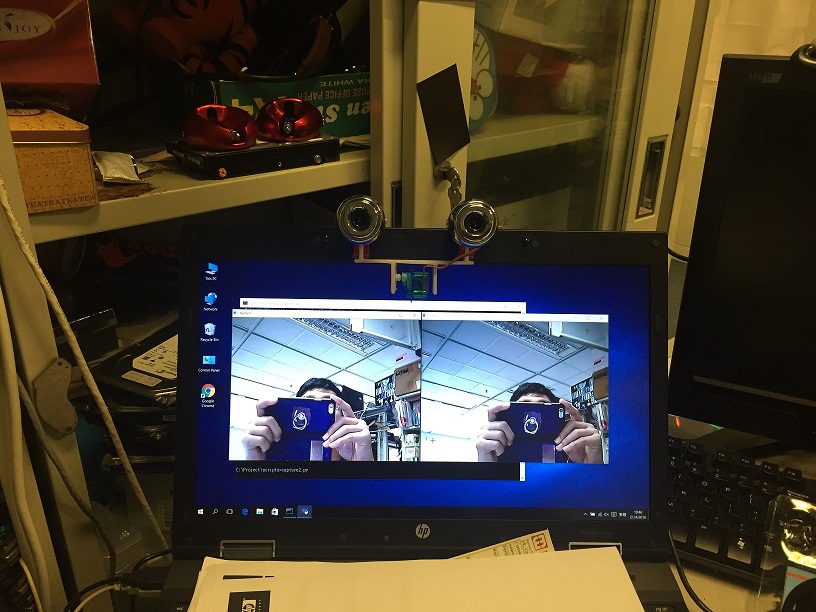
Construction of stereo camera with pen-tilt capability:
Connection joint for fixing servos and cameras with 2 degree of movement (pen-tilt)
Camera Mount:
11 Apr., 2016Servo library v0.1: here Servo test program: here Mar., 2016A new system is setup. The softwre configuration is: - Windows 10 - Python - OpenCV - pywin32 - pyttsx Hardware configuration is: - i7 Notebook - Pololu Micro Maestro 6-Channel USB Servo Controller - Webcam x 2 24 Dec., 2005Merry Chirstmas. A robotic hand was built. It was constructed with a toy hand and four servos. A total of four fingers were controlled by a PC machine running with Windows XP. The program is written under .net framework in C#. Control interface: 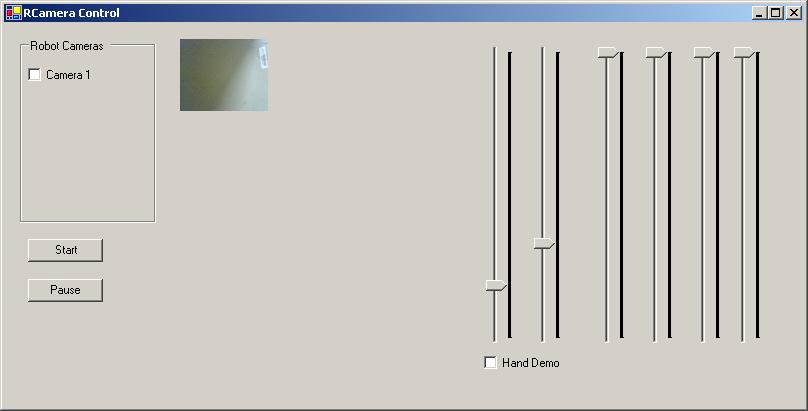
The degree of movement of each finger is too little. It is the problem of my USB servo control which can provide 45 degree servo rotation signal only. The next task is upgrade the controller which support large rotational degree. Demonstration movie: here 19 Nov., 2005Building of the body of Momo is done. Here is the demonstration: hereRemote control computer: photo1 photo2 Remote view: photo Actual view: photo1 photo12 25 May., 2005The body of Momo is put on the base. Base1 Base2 Body1 body224 Apr., 2005The base of Momo is done today. Here is the photos in progress:1(bottom) 1(top) 1(top) 2(top) 2(top) 2(bottom) 2(bottom) 12 Apr., 2005ER1 robot is now being rebuilt. I will not use the beams provide by ER1 this time. Other metallic plates and beams are used instead. It will be builded from the base to the top(head). A base for fixing two motor wheels is now in progress. On the base, the penguin will be put on.15 Feb., 2005Starting from today, I will rebuild my robot. A penguin shape rubbish bin is bought and I will use it as the shell of my robot. Her name will be "momo"13 Mar., 2004Version 0.6 for RCMotion, Reset and SetLimitSwitchMode are added to WheelInit function. Source is available here. The communcation on the serial port is captured here.1 Mar., 2004Control of robot movement(forward, backward, turning left, turning right and stop) are added to the image processing GUI interface.10 Jan., 2004Version 0.5 of RCMotion, here is the source. It is low level function call to communicate with the RCM through the serial interface. There are only four higher level function calls are defined:
2 Jan., 2004Programming of the motion part was started. Two documents were downloaded from http://www.pmdcorp.com(Thanks for Erpet for directing me there). They are Pilot Motion Processor User's Guide and Programmer's Reference. I am planning to write a program to control the motion of my robot with a IR remote control(it is the one I used for my Final Year Project seven years ago! It is a reliable remote:>. Dec., 2003I recevied a mini PC. It will be used as the "brain" of my robot. It is a P4 1.8GHz (overclocked to 2.4GHz and running very stable), 256MB RAM. It takes 20V but I found that 12V robot battery is enough to power it. The size of "momo" is increased by adding some more beams. Here was the new form. A wireless AP was installed on the machine. With Windows Terminal Service, the robot could be controlled remotely. The color tracking program was written. It captured an image with RGB values and convert it to Hue/Satuation/Intensity values. The camera could now track my red chair or any red object. Some more image algorithms need to be added. Nov., 2003An image capturing program from a web camera is done. It used DirectShow CaptureFilter to capture a series of images. I am starting reading some books about image processing to manupulate them. The first target is to write a programme to identify a color and the camera will follow the movement. Oct., 2003I have ordered a set of muscle kit. It includes 5 muscle-wire pistons, a book, a electronic butterfly and a lovely toy robotic(free gift). I am looking for a toy hand(It is a hand at one end and a handle at the another end of a stick, when you squeeze the handle, the hand will close. I had seen it when I was very young) from many local toy stores but it is difficult to find it nowaday. With five pistons, each finger of the hand could be controlled electronically 15th May., 2003I bought one more hub USB and parts for added a power outlet from the battery. The battery now have three power outlet and supply power to all of my device. 4th May., 2003The original prototype of the robot is built. To get familiar of the contruction, the instruction on the manual is followed exacted with only a very little different. Her name will be "momo" Following partes was installed: 1. Grabber, 2. Camera, 3. Motion controller, 4. Robotic wheels with the step motor 5. Batter, 6. Notebook. 7. Infrared sensor. It is a remarkable progress that I have all the necessary basic hardware to build robot. Although I bought all the hardwares, I am still going to investigate the possibility of building my own stepper motor controle. Here is the task list to be done. Thank you very much for Rayray who borrow her notebook to me to test the robot. 1st May., 2003The whole robotic set arrive today. Very excited. I am going to construct it tonight. 19 Apr., 2003I re-check http://www.evolution.com today that they make delivery to Hong Kong already. Since they will do free shipping if I purchase "Bundle Pack". I choose this option. It come along with main unit, a grabber, some X Beam(frame), IR sensor. It cost me US$950 27 Jan., 2003I am testing the stepper motor with my USB controller. I was so silly that mis-used the Vcc line and thought that it is the output (0). I should have read the manual carefully. Anyway, the signal pattern is known now but the power and speed is not good if it is connected directly. I may need to add a stepper motor driver (or even controller) to make it work batter. 25 Jan., 2003Pin assignment of my stepper motor were figured out. There are two ways to check which pin is the Vcc: 1. Unscrew the screw, open the motor and check the wires connection, or 2. Use a multimeter to check the resistance. The resistance of signal-signal wires pair is the double of singal-Vcc wire pair. 22 Jan., 2003Machanical part of my robotic eye was finished. It is composed of two servos and one USB camera. It permits 90 degree horizontal rotation and 90 degree of vertical rotation. It looks like alive when I use a dummy GUI to make it move. Great!! 15 Jan., 2003Three servo horns for my robotic eye device and some 2mm screws were bought in Mong Kok. Each servo horn pack containings three shape of horns and cost only HK$10. Quite cheap. However, screws are very expensive 12 cost me HK$32. I would rather buy it from Apliu Street next time.Useful links:
|



 Servo Mount:
Servo Mount:


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}